By Vishal Goel, | December 22, 2016
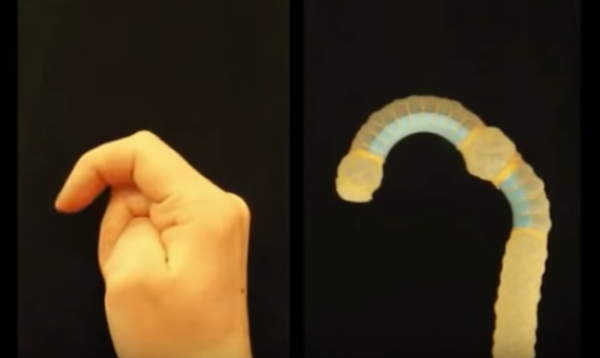
This soft actuator bends like an index finger when powered by a pressure source. (YouTube)
Harvard researchers have created a model to automatically design a soft robot that can perform desired biological movements. The team used the tool to develop a soft robot that bends like an index finger and twists like a thumb when powered by a single pressure source.
To design the organically-moving soft robot, researchers collaborated from the Harvard John A. Paulson School of Engineering and Applied Sciences and the Wyss Institute for Biologically Inspired Engineering.
Like Us on Facebook
According to Fionnuala Connolly, a graduate student at SEAS and first author of the research paper published in The Proceedings of the National Academy of Sciences, designing a soft robot that can bend like a finger or knee may seem quite simple in the beginning, but the motion is incredibly complex.
"The design is so complicated because one actuator type is not enough to produce complex motions. You need a sequence of actuator segments, each performing a different motion and you want to actuate them using a single input," Connolly explained.
According to Katia Bertoldi, a John L. Loeb Associate Professor of Natural Sciences and co-author of the paper, rather than designing these actuators empirically, they created a tool that would take a motion as an input and output a method to design the actuator to achieve that motion.
The team used mathematical models of fluid-powered and fiber-reinforced actuators to optimize the design of an actuator to perform a certain motion.
Highlighting future applications of the soft robot, Conor Walsh, a John L. Loeb Associate Professor of Engineering and Applied Sciences, Core Faculty Member at the Wyss Institute for Biologically Inspired Engineering and co-author of the paper, said that the research streamlines the process of designing soft robots that can perform complex movements.
"It can be used to design a robot arm that moves along a certain path or a wearable robot that assists with motion of a limb." he said.
This new methodology will be included in the Soft Robotic Toolkit which is an online and open-source resource developed at SEAS to assist researchers, educators, and budding innovators to design, fabricate, model, characterize, and control their soft robots.








-
Use of Coronavirus Pandemic Drones Raises Privacy Concerns: Drones Spread Fear, Local Officials Say

-
Coronavirus Hampers The Delivery Of Lockheed Martin F-35 Stealth Fighters For 2020

-
Instagram Speeds Up Plans to Add Account Memorialization Feature Due to COVID-19 Deaths

-
NASA: Perseverance Plans to Bring 'Mars Rock' to Earth in 2031

-
600 Dead And 3,000 In The Hospital as Iranians Believed Drinking High-Concentrations of Alcohol Can Cure The Coronavirus

-
600 Dead And 3,000 In The Hospital as Iranians Believed Drinking High-Concentrations of Alcohol Can Cure The Coronavirus
-
COVID-19: Doctors, Nurses Use Virtual Reality to Learn New Skills in Treating Coronavirus Patients
